DRAGON-01 Small Tracking Robot Chassis
CHIJONGO-01 Wamng'onoTwoyimbaRobotChassis
Mwachidule
Small crawler robot chassis ndiyoyenera pansi pagalimoto yamagalimoto, pansi pa alumali ndi malo ena opapatiza komanso otsika.Chassis imatengera crawler + kutsogolo kawiri kugwedezeka kwa mkono, makina onsewo ndiukadaulo wopanda madzi, amatha kuzolowera mitundu yonse yamayendedwe omenyera mwachangu.Mawonekedwe owonjezera a Multifunction amatha kudzazidwa ndi ma module osiyanasiyana.Mikono yogwedezeka ya chassis imatha kugawidwa momasuka, ingagwiritsidwe ntchito pazinthu zambiri.
Zosintha zaukadaulo:
I-Basic chassis magawo:
1. Dzina: Kachisi kakang'ono ka roboti
2. Chitsanzo: DRAGON-01
3.★Mulingo wachitetezo: thupi la chassis silingalowe madzi IP68
4. Mphamvu: magetsi, ternary lithiamu batire
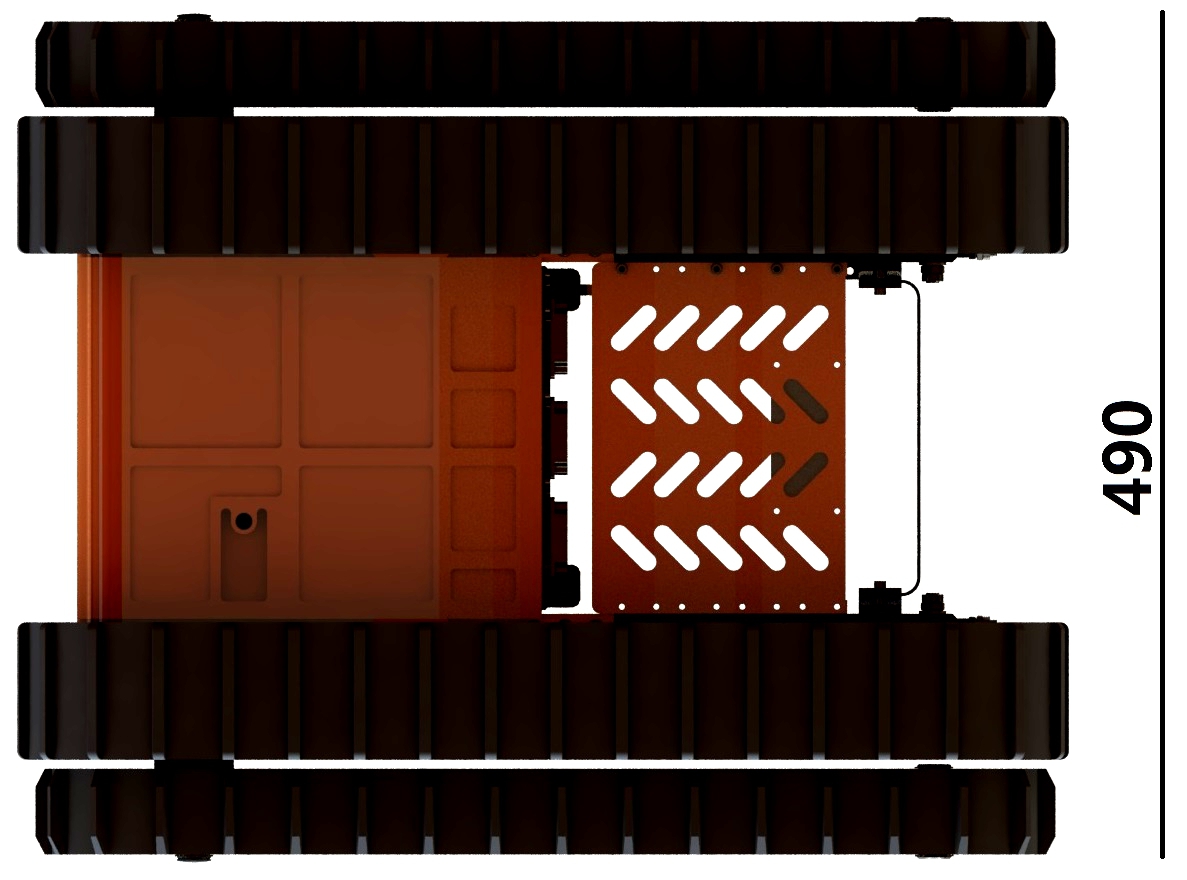
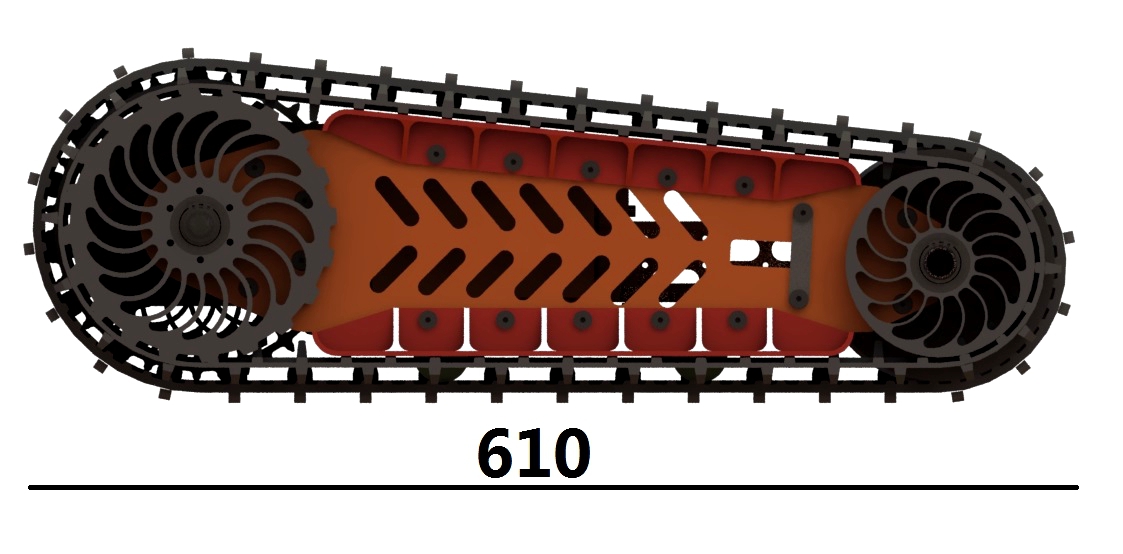
5. Chassis kukula: kutalika 610mm × m'lifupi 490mm × kutalika 210mm
6. The kanyumba kukula ≤kutali 255mm×m'lifupi 200mm×utali 85mm
7. Chilolezo chapansi: 55mm
8. Kulemera kwake: 23kg
9. Kulemera kwakukulu: 20kg
10. Mphamvu yamagalimoto: 180W × 2
11. Kusankhidwa kwa magalimoto: 24V yapamwamba kwambiri ya DC servo motor
12. Njira yowongolera: chiwongolero chosiyana m'malo
13.★Kuthamanga kwakukulu: 2.7m/s
14.★Kutalika kopingasa: 280mm
15.★Kutalikirapo chotchinga: ≤410mm
16.★Maximum kukwera ngodya: 45°
17.★Maximum kukwera ngodya: 45°
18. Chithandizo chapamwamba: utoto wonse wa makina
19. Thupi lalikulu lakuthupi: aluminiyamu alloy
20. ★Chassis crawler: Chokwawacho chidzapangidwa ndi labala wosagwira moto, anti-static komanso kutentha kwambiri wokhala ndi ulusi wa Kevlar.ndi kapangidwe ka chitetezo cha track derailment;
II-Zosankhamagawo:
| Kanthu | Zofotokozera | |||||
| Sinthani Mwamakonda Anu-EX | EX / Non-EX | |||||
| Batiri | 24V20AH/24V40AH/(mphamvu ya batriSinthani mwamakonda malinga ndi zosowa) | |||||
| Charger | 8A | 15A | ||||
| Akutali | Mtengo wa MC6C | T32 | Sinthani Mwamakonda Anu-kulamulira | |||
| Bulaketi | makonda | |||||
| Sinthani-chassis | kulitsa | kulitsa | kuwonjezera mphamvu | kuthamanga kwachangu | ||
| Mtundu | makonda(mtundu wosasintha ndi lalanje) | |||||
III-ZosankhaMa parameter anzeru:
| Kanthu | Zofotokozera | |||
| Malingaliro a kupewa zopinga | Akupanga chopinga kupewa | Kupewa zopinga za laser | ||
| Positioning ndi navigation | laser navigation | 3D modelling | RTK | |
| Kulamulira | 5G control | Kuwongolera Mawu | Tsatirani | |
| Dndi transmission | 4G | 5G | Ad-Hoc Network | |
| Kuwonera makanema | Kuwala Kowoneka | Mawonekedwe ausiku a infrared | Kujambula kwa infrared thermal | |
| Kuzindikira Zachilengedwe | Temp,chinyezi | gasi wowopsa | makonda | |
| Condition Monitoring | Kuwunika mkhalidwe wamagalimoto | Kuyang'anira mawonekedwe a batri | Drive status monitoring | |
Pkasinthidwe ka roduct:
- Maloboti oyenda pang'ono*1set
- Terminal yowongolera kutali (kuphatikiza batri)*1 seti
- Chaja chakutali (12.6V)*1ma PC
- Chaja chagalimoto yamagalimoto (25.2V)*1ma PC
- Zida zothandizira*1 seti
- Malangizo*1 kopi
- Chitsimikizo chogwirizana*1 kopi
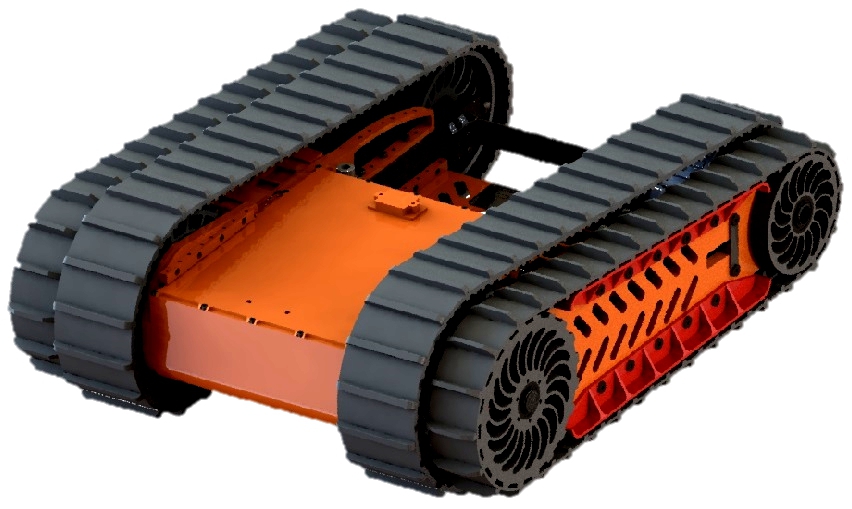
Zithunzi: